
The long-term goal is to develop robotic tools and AI systems to
monitor, model and manage food-producing ecosystems. The ecosystems that we are targeting are small, highly diversified, organic farms. The tools that we are designing will have to intervene in this complex natural environment and will have to gather the necessary data that allows to track and predict the health of the plants and the ecosystem.
These new tools may help increase food production AND the biodiversity of farming systems while at the same time lowering the physical effort needed to run a farm.
We are currently working on the first steps towards this goal in the EU funded project Robotics for Microfams (ROMI). Our starting point was the observation that all over Europe, young farmers are starting small market farms and direct sales businesses. These farms can be found both in rural, peri-urban and urban areas. They grow a large variety of crops (up to 100 different varieties of vegetables per year) on small surfaces (0.01 to 5 ha) using agroecological farming
practices. These farms have proven to be highly productive, sustainable and economically viable. However, a lot of work is done manually, resulting in physically challenging work conditions.
The ROMI project will develop an open and lightweight robotics
platform for these microfarms. We will assist these farms in weed reduction and crop monitoring. This will reduce manual labour and increase productivity through advanced planning tools. Thanks to ROMI’s weeding robot, farmers will save 25% of their time. This land robot will also acquire detailed information on sample plants and will
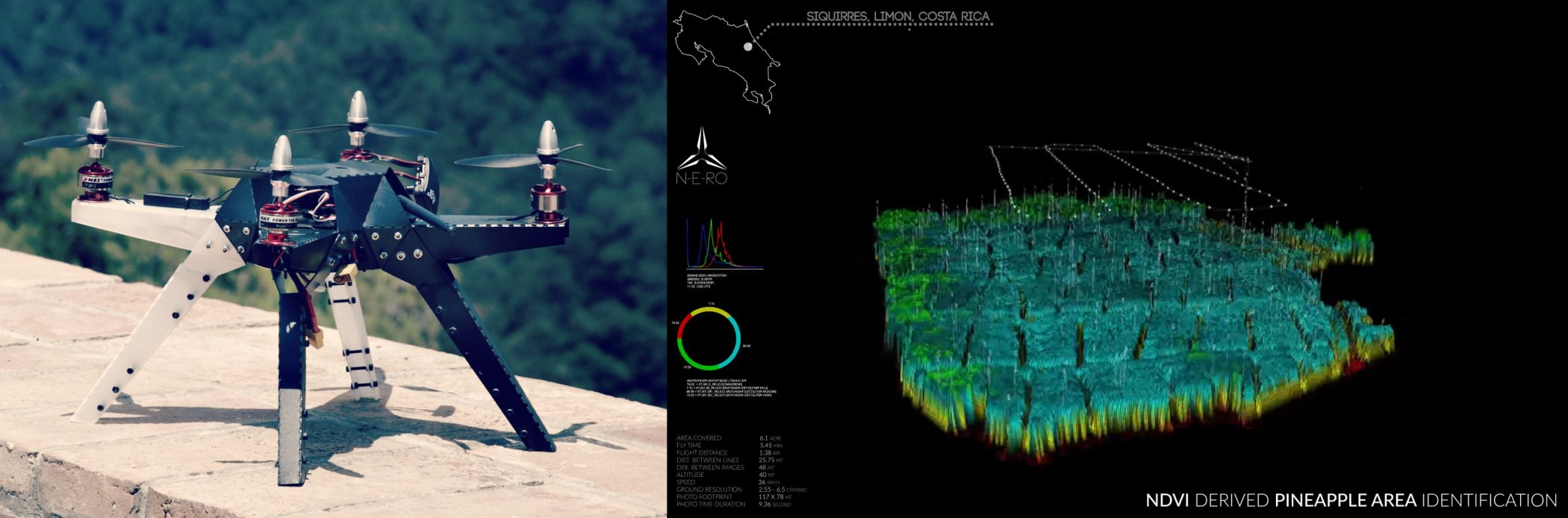
be coupled with a drone that acquires more global information at the crop level. Together, they will produce an integrated, multi-scale picture of the crop development that will help the farmer monitor the crops to increase efficient harvesting. For this, ROMI will have to adapt and extend state-of-the-art land-based and air-borne monitoring tools to handle small fields with complex layouts and mixed crops.
To achieve this, we will: (i) develop and bring to the market an affordable, multi-purpose, land-based robot, (ii) develop a weeding app for this robot that is adapted for organic microfarms, (iii) apply advanced 3D plant analysis and modelling techniques to in-field data acquisition, (iv) integrate these analysis techniques in the robot for detailed plant monitoring, (iv) integrate these techniques also in the aerial drone N-E-R-O for multi-scale crop monitoring, (v) extend the robot with novel, adaptive learning techniques to improve sensorimotor
control of the plant monitoring app, and (vii) test the effectiveness of our solution in real-world field conditions.
ROMI is a collaboration between the following partners:
– Institute of Advanced Architecture of Catalonia (Iaac / FabLab Barcelona / Noumena)
– Sony Computer Science Laboratories Paris
– Institut national de recherche en informatique et en automatique (Inria)
– Centre national de la recherche scientifique (CNRS / ENS Lyon)
– Humboldt-Universität zu Berlin
– Pépinières Chatelain & Chatelain Maraîchage
– France Europe Innovation
This project has received funding from the European Union’s Horizon 2020 research and innovation programme under grant agreement No 773875.